Oct 4, 2018
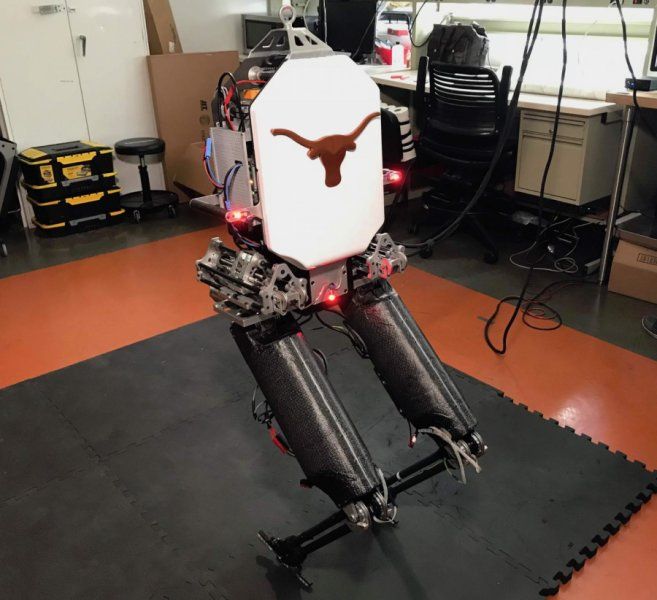
Model helps robots navigate more like humans do
Posted by Bill Kemp in categories: information science, robotics/AI

When moving through a crowd to reach some end goal, humans can usually navigate the space safely without thinking too much. They can learn from the behavior of others and note any obstacles to avoid. Robots, on the other hand, struggle with such navigational concepts.
MIT researchers have now devised a way to help robots navigate environments more like humans do. Their novel motion-planning model lets robots determine how to reach a goal by exploring the environment, observing other agents, and exploiting what they’ve learned before in similar situations. A paper describing the model was presented at this week’s IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Popular motion-planning algorithms will create a tree of possible decisions that branches out until it finds good paths for navigation. A robot that needs to navigate a room to reach a door, for instance, will create a step-by-step search tree of possible movements and then execute the best path to the door, considering various constraints. One drawback, however, is these algorithms rarely learn: Robots can’t leverage information about how they or other agents acted previously in similar environments.