Aug 23, 2022
Bionic underwater vehicle inspired by fish with enlarged pectoral fins
Posted by Saúl Morales Rodriguéz in categories: cyborgs, mapping, robotics/AI, transhumanism, transportation
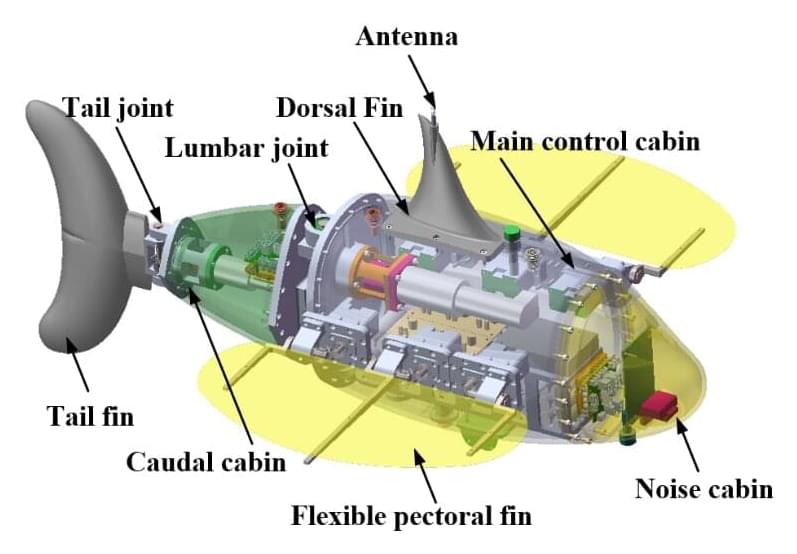
Underwater robots are being widely used as tools in a variety of marine tasks. The RobDact is one such bionic underwater vehicle, inspired by a fish called Dactylopteridae known for its enlarged pectoral fins. A research team has combined computational fluid dynamics and a force measurement experiment to study the RobDact, creating an accurate hydrodynamic model of the RobDact that allows them to better control the vehicle.
The team published their findings in Cyborg and Bionic Systems on May 31, 2022.
Underwater robots are now used for many marine tasks, including in the fishery industry, underwater exploration, and mapping. Most of the traditional underwater robots are driven by a propeller, which is effective for cruising in open waters at a stable speed. However, underwater robots often need to be able to move or hover at low speeds in turbulent waters, while performing a specific task. It is difficult for the propeller to move the robot in these conditions. Another factor when an underwater robot is moving at low speeds in unstable flowing waters is the propeller’s “twitching” movement. This twitching generates unpredictable fluid pulses that reduce the robot’s efficiency.