May 2, 2023
The fascinating science of who succeeds in art
Posted by Kelvin Dafiaghor in categories: information science, science
This scientist made an algorithm to predict which artists succeed–without even looking at their art.
This scientist made an algorithm to predict which artists succeed–without even looking at their art.

Greater scale and symbolic models are necessary before AI and machine learning can meet big challenges like breaking the best encryption algorithms.

Researchers have taught an AI to make artificial genomes — possibly overcoming the problem of how to protect people’s genetic information while also amassing enough DNA for research.
Generative adversarial networks (GANs) pit two neural networks against each other to produce new, synthetic data that is so good it can pass for real data. Examples have been popping up all over the web — generating pictures and videos (a la “this city does not exist”). AIs can even generate convincing news articles, food blogs, or human faces (take a look here for a complete list of all the oddities created by GANs).
Now, researchers from Estonia are going more in-depth with deepfakes of human DNA. They created an algorithm that repeatedly generates the genetic code of people that don’t exist.
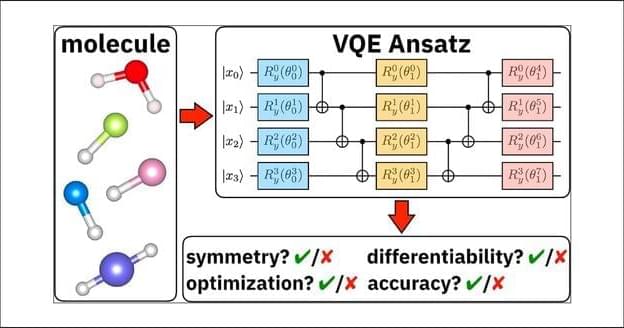
Advances in quantum computation for electronic structure, and particularly heuristic quantum algorithms, create an ongoing need to characterize the performance and limitations of these methods. Here we discuss some potential pitfalls connected with the use of hardware-efficient Ansätze in variational quantum simulations of electronic structure. We illustrate that hardware-efficient Ansätze may break Hamiltonian symmetries and yield nondifferentiable potential energy curves, in addition to the well-known difficulty of optimizing variational parameters. We discuss the interplay between these limitations by carrying out a comparative analysis of hardware-efficient Ansätze versus unitary coupled cluster and full configuration interaction, and of second-and first-quantization strategies to encode Fermionic degrees of freedom to qubits.
People’s Liberation Army (PLA) researchers claim they have created algorithm-based technology to defeat sophisticated hypersonic missile interception systems.
Engineers led by Zhang Xuesong from China’s Strategic Support Force Information Engineering University developed the algorithm that analyzes the trajectory of hypersonic missiles in order to avoid detection by missile defense systems, South China Morning Post (SCMP) reported on Saturday.
The algorithm “can analyze the trajectory of these hypersonic weapons to help them avoid missile defense systems, including advanced systems under development” in the US, claimed the engineers in a paper published in the Chinese journal Common Control and Simulation last month.
“The new capability of low thermal budget growth on an 8-inch scale enables the integration of this material with silicon CMOS technology and paves the way for its future electronics application.”
With our pockets and houses filling with electronic gadgets and AI and Big Data fueling the rise of data centers, there is a need for more computer chips— more powerful, potent, and denser than ever.
These chips are traditionally made with boxy 3D materials bulky in nature, making stacking these into layers difficult.
Within a year, Karl Schwarzschild, who was “a lieutenant in the German army, by conscription, but a theoretical astronomer by profession,” as Mann puts it, heard of Einstein’s theory. He was the first person to work out a solution to Einstein’s equations, which showed that a singularity could form–and nothing, once it got too close, could move fast enough to escape a singularity’s pull.
Then, in 1939, physicists Rober Oppenheimer (of Manhattan Project fame, or infamy) and Hartland Snyder tried to find out whether a star could create Schwarzschild’s impossible-sounding object. They reasoned that given a big enough sphere of dust, gravity would cause the mass to collapse and form a singularity, which they showed with their calculations. But once World War II broke out, progress in this field stalled until the late 1950s, when people started trying to test Einstein’s theories again.
Physicist John Wheeler, thinking about the implications of a black hole, asked one of his grad students, Jacob Bekenstein, a question that stumped scientists in the late 1950s. As Mann paraphrased it: “What happens if you pour hot tea into a black hole?”

Deep learning algorithms are prone to a previously unknown problem, say a team of computer scientists at Google.

Amazon is building a more “generalized and capable” large language model (LLM) to power Alexa, said Amazon CEO Andy Jassy during the company’s first-quarter earnings call yesterday. An LLM, like ChatGPT, is a deep learning algorithm that can recognize, summarize and generate text and other content based on knowledge from enormous amounts of text data.
Jassy said that although Amazon has had an LLM powering Alexa, the tech giant is working on one that is more capable than the current one. The Amazon executive believes that the addition of an improved LLM will help Amazon work toward its goal of building “the world’s best personal assistant,” but acknowledged that it will be difficult to do so across many domains.
“I think when people often ask us about Alexa, what we often share is that if we were just building a smart speaker, it would be a much smaller investment,” said Jassy during the call. “But we have a vision, which we have conviction about that we want to build the world’s best personal assistant. And to do that, it’s difficult. It’s across a lot of domains and it’s a very broad surface area. However, if you think about the advent of Large Language Models and generative AI, it makes the underlying models that much more effective such that I think it really accelerates the possibility of building that world’s best personal assistant.”
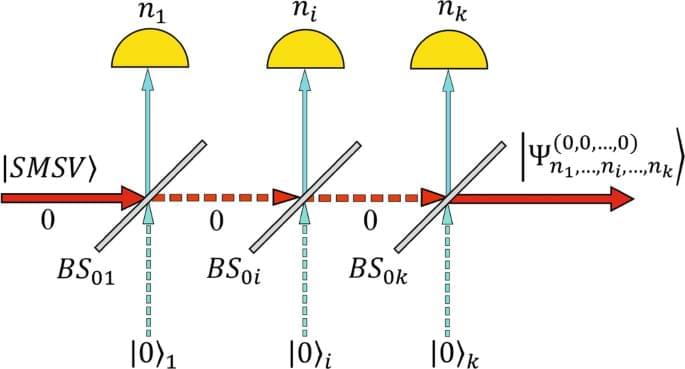
We present an algorithm of quantum engineering of large-amplitude $$\ge 5$$ high-fidelity $$\ge 0.99$$ even/odd Schrödinger cat states (SCSs) using a single mode squeezed vacuum (SMSV) state as resource. Set of $$k$$ beam splitters (BSs) with arbitrary transmittance and reflectance coefficients sequentially following each other acts as a hub that redirects a multiphoton state into the measuring modes simultaneously measured by photon number resolving (PNR) detectors. We show that the multiphoton state splitting guarantees significant increase of the success probability of the SCSs generator compared to its implementation in a single PNR detector version and imposes less requirements on ideal PNR detectors.







